We consider global conditioning property of Linear Program (LP) here. Let’s first define the problem. The standard form of LP is
where 


Now suppose we add perturbation 


Let 


Such questions are called the conditioning of Program (2). It asks under some perturbation, how does the solution and optimal value changes accordingly. In general, we hope that Program (1) and (2) to be stable in the sense that small perturbation in the data, i.e., 


- Whether
- Whether
To address the first issue, we make our first assumption that
A1: Program (2) has a solution and the optimal value is finite.
Under A1, by strong duality of LP, we have that Program (1) also has a solution and the optimal value is the same as the optimal value of Program (2). This, in particular, implies that (1) is feasible. We now characterize the region where

the set of vertices of 



Now according to the Resolution Theorem of the primal polyhedron, we have

Using this representation, the fact that the primal of Program (3) is

and strong duality continue to hold for (3) and (5) as (5) is feasible by A1, the value of

Thus it is immediate that the region where

In particular, if 
To address the issue whether
A2: All the basic feasible solution of (1) are non-degenerate, i.e., all vertices of the feasible region of Program (1) have exactly 
Under this condition, and the definition of basic feasible solution, we know if 





is the unique solution to Program (3) where 

and
where 
By defining

which is a polyhedron, we may write the above compactly as

Then it is easy to see that the Lipschitz condition of

where 


Similarly, by using the theorem in this post, we see that

where 

Theorem 1 Recall
is the set of extreme points of the feasible region of (1),
is the set of extreme points of the feasible region of (1) and
. Under assumption A1 and A2, we have for all
,
and
where
are arbitrary norms. Here
.

How might one bound the Lipschitz constants

The former might be done by giving a bound of the diameter of the feasible region
 and a set of
and a set of  linear functions
linear functions  where each
where each  being closed polyhedrons in
being closed polyhedrons in  , i.e.,
, i.e.,  for some
for some  , and
, and  and
and  . Moreover, for any
. Moreover, for any  , and
, and  , we have
, we have  . Then we can define function
. Then we can define function  on
on  such that
such that
 is convex. We now state a theorem concerning the Lipschitz constant of
is convex. We now state a theorem concerning the Lipschitz constant of  ,
,  -Lipschitz continuous with respect to
-Lipschitz continuous with respect to  and
and  , i.e., for all
, i.e., for all  ,
, 
 is
is 
 ,
,  and
and  . we see the inequality
. we see the inequality 
 for any
for any  , we have that there exists
, we have that there exists  and corresponding
and corresponding  such that
such that 
 where
where  . We also let
. We also let  and
and  . These
. These  s have the property that
s have the property that 
 by
by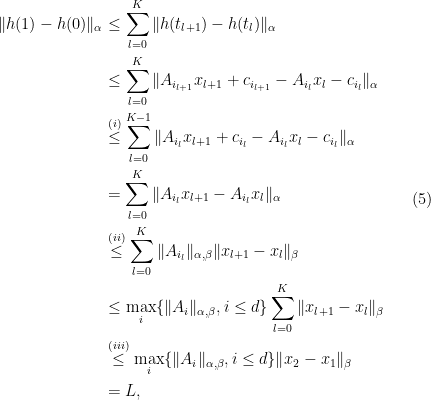
 is due to inequality
is due to inequality  is due to the definition of operator norm and
is due to the definition of operator norm and  is using equality
is using equality 
 and we know that
and we know that  only takes value in a convex set
only takes value in a convex set  , i.e.,
, i.e.,

 exists. It is then natural to ask how about conditional expectation. Is it true for any reasonable sigma-algebra
exists. It is then natural to ask how about conditional expectation. Is it true for any reasonable sigma-algebra  that
that
 , and for any probability measure
, and for any probability measure  on
on  with
with
 to
to  is the usual Borel sigma algebra on
is the usual Borel sigma algebra on  . If
. If 

 .
. such that for almost all
such that for almost all  , we have for any
, we have for any 

 , we have
, we have
 and
and  , we have for almost all
, we have for almost all  ,
,

 , we know that for almost all
, we know that for almost all 
 we have a probability distribution
we have a probability distribution  on
on  with mean equals to
with mean equals to  and
and  . This is exactly the situation of Theorem
. This is exactly the situation of Theorem 
 ,
,  ,
,  where
where  and
and  are cumulative distribution function and
are cumulative distribution function and  are finite. We prove the following theorem.
are finite. We prove the following theorem. norm) For independent random variables
norm) For independent random variables 

 .
. is usually referred as mean absolute difference and it measures the spread of a distribution. I don’t know the term for the quantity
is usually referred as mean absolute difference and it measures the spread of a distribution. I don’t know the term for the quantity  but what it measures is the difference between the distribution
but what it measures is the difference between the distribution  to estimate/predicts
to estimate/predicts  , then the expected error (the cross mean difference) in terms of absolute value (
, then the expected error (the cross mean difference) in terms of absolute value ( , which can be considered as variance and the difference in the two distribution ,i.e.,
, which can be considered as variance and the difference in the two distribution ,i.e.,  , which can be considered as bias.
, which can be considered as bias. norm) and it is
norm) and it is
 , and the difference of mean can be considered as bias as well.
, and the difference of mean can be considered as bias as well. both have first finite moments. In the case either
both have first finite moments. In the case either  .
.

 and
and  which is finite because
which is finite because  is
is 
 . If
. If 

 ,
,

 .
. is very small, then how small is the distance
is very small, then how small is the distance  . We might expect that
. We might expect that  will imply that
will imply that  . This is true if
. This is true if  is compact and
is compact and  , and the distance to the solution, i.e.,
, and the distance to the solution, i.e., 
 .
.  means each coordinate of
means each coordinate of  , and the distance to the solution set
, and the distance to the solution set  to be
to be  . Note that the norm here is arbitrary, not necessarily the Euclidean norm.
. Note that the norm here is arbitrary, not necessarily the Euclidean norm. which depends only on
which depends only on  ,
,
 , and the distance to the solution set, i.e.
, and the distance to the solution set, i.e.  , are the same up to a multiplicative constant. The right inequality of the theorem is usually referred to as linear growth in the optimization literature.
, are the same up to a multiplicative constant. The right inequality of the theorem is usually referred to as linear growth in the optimization literature. where
where  and
and  for
for  and
and  . Here
. Here  is the dual norm and
is the dual norm and  are extreme points and extreme rays. We assume there are
are extreme points and extreme rays. We assume there are  many extreme points and
many extreme points and  many extreme rays with first
many extreme rays with first  s and first
s and first  are in the optimal set
are in the optimal set  . See the proof for more detail.
. See the proof for more detail. and
and 
 s are extreme points of the feasible region and
s are extreme points of the feasible region and  s are extreme rays. By scaling the extreme rays, we can assume that
s are extreme rays. By scaling the extreme rays, we can assume that  for all
for all  .
.
 many
many  and
and  since the
since the  .
.
 and
and  .
.
 for all
for all  here.
here. . We have
. We have
 and the inequality is because of the definition of
and the inequality is because of the definition of  and the
and the  s are positive.
s are positive.
 with
with  and
and  and apply triangular inequality to the above quantity, we have
and apply triangular inequality to the above quantity, we have
 . The second inequality is applying the definition of
. The second inequality is applying the definition of  and
and  . The first equality is due to
. The first equality is due to  and the second equality is due to
and the second equality is due to 
 by our previous argument, we see that setting
by our previous argument, we see that setting


 , then
, then
 is actually bounded and closed (
is actually bounded and closed ( .
. . We have
. We have
 and
and  are
are  such that
such that



 and
and  where
where  or
or  is understood as
is understood as  and we overload the notation
and we overload the notation  to mean
to mean  . The probability space
. The probability space  are convex sets in
are convex sets in  , then there exists a nonzero
, then there exists a nonzero  such that
such that
 .
. is always an interval.
is always an interval. dimension in
dimension in  for some
for some  and
and  .
. is not in
is not in  such that
such that
 almost surely, we should have
almost surely, we should have
 , we see that
, we see that  with probability
with probability  . Since intersection of the hyperplane of
. Since intersection of the hyperplane of  and
and  dimensional affine space.
dimensional affine space. . After a proper translation and rotation, we can say that
. After a proper translation and rotation, we can say that  and we want to argue that the mean of
and we want to argue that the mean of  , we should have its mean in the interval. If the interval is half open and half closed and if the means is not in the interval, then
, we should have its mean in the interval. If the interval is half open and half closed and if the means is not in the interval, then  must be the open end of the interval since expectation preserves order, but this means that
must be the open end of the interval since expectation preserves order, but this means that  . This completes the proof.
. This completes the proof.  to a measurable space
to a measurable space  where each singleton set of
where each singleton set of  is in
is in  . Let each
. Let each  be a real valued (Borel measurable) function with its domain to be
be a real valued (Borel measurable) function with its domain to be  . Given
. Given
 such that
such that  values in
values in 
 , then just ignore these. I put these term here just to make sure the that the theorem is rigorous enough.)
, then just ignore these. I put these term here just to make sure the that the theorem is rigorous enough.) with its first
with its first 


 and
and  .
. and its all
and its all  th order moments are finite, i.e.,
th order moments are finite, i.e.,
 . Each
. Each  here is a nonnegative integer. The total number of moments in this case is
here is a nonnegative integer. The total number of moments in this case is  . Then there is a real random vector
. Then there is a real random vector  such that it takes no more than
such that it takes no more than  values, and
values, and
 , and any random variable
, and any random variable 

 takes only finitely many value. But it is true that
takes only finitely many value. But it is true that 
 is
is
 which takes value only in
which takes value only in  , by Lemma
, by Lemma 
 has a FINITE representation in terms of
has a FINITE representation in terms of  s!
s! ,
,  and
and  such that
such that
 for some
for some  , we can simply take the distribution of
, we can simply take the distribution of 
 .
. 